Inversione circolare

Questa voce o sezione sull'argomento geometria non cita le fonti necessarie o quelle presenti sono insufficienti.

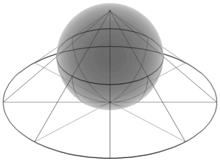
Nella geometria piana, l'inversione circolare è una particolare trasformazione che "specchia" i punti rispetto ad una data circonferenza. Non si tratta di una trasformazione geometrica piana in senso stretto, perché mappa il centro della circonferenza "all'infinito": si tratta piuttosto di una trasformazione della sfera ottenuta aggiungendo il punto all'infinito al piano tramite proiezione stereografica.
Più in generale, una inversione può essere definita anche in uno spazio tridimensionale (a partire da una sfera, e in questo caso viene detta inversione sferica) o in uno spazio euclideo .

Definizione

Sia una circonferenza di centro e raggio . L'inversione circolare rispetto a è la funzione che associa ad ogni punto del piano distinto da il punto appartenente alla semiretta uscente da e passante per tale che







Il punto è detto punto inverso di rispetto alla circonferenza e è detta potenza dell'inversione.

Punto all'infinito
L'inversione non è definita per . Si può definire l'inversione in aggiungendo al piano un punto, il "punto all'infinito" , e ponendo



In altre parole, l'inversione scambia il centro della circonferenza con il punto all'infinito. Tramite proiezione stereografica, il piano arricchito del punto all'infinito può essere identificato con una sfera: l'inversione è quindi in realtà una trasformazione della sfera. La topologia euclidea indotta sul piano si può estendere al caso in cui aggiungiamo il "punto all'infinito" sfruttando la tecnica della compattificazione di Alexandrov. In questo modo una naturale famiglia di intorni aperti per il punto all'infinito risulta quindi l'insieme dei complementari dei cerchi chiusi centrati nell'origine. Si può dimostrare in modo semplice che con questa topologia l'inversione è ancora continua e biunivoca ed è una involuzione.
Costruzione con riga e compasso

L'inverso di un punto può essere costruito con riga e compasso.
Caso 1: Il punto è esterno alla circonferenza
Si traccino le tangenti alla circonferenza passanti per . Sia uno dei suoi due punti di intersezione con e sia la proiezione ortogonale di su . Si consideri il triangolo rettangolo di vertici , , . Per il primo teorema di Euclide:



Il punto è, quindi, il trasformato di mediante l'inversione di centro e di potenza .
Caso 2: Il punto è interno alla circonferenza

Si consideri la retta passante per e per . Si tracci la retta passante per e perpendicolare a tale retta. Troviamo così i punti di intersezione con , allora per il primo teorema di Euclide, è il punto di intersezione delle tangenti a condotte per tali punti.
Caso 3: Il punto appartiene alla circonferenza
In questo caso coincide con . Tutti i punti di sono quindi punti fissi, cioè è un insieme puntualmente invariante rispetto all'azione di .
Proprietà


Involuzione
L'inversione è una involuzione: se tramite una inversione , allora . In altre parole, componendo con sé stessa si ottiene la funzione identità. Quindi l'inversione è una corrispondenza biunivoca della sfera (ottenuta aggiungendo al piano il punto all'infinito)




e coincide con la sua funzione inversa .

Composizione
La composizione di inversioni non è mai una inversione. La composizione di due inversioni aventi lo stesso centro e potenze (cioè il quadrato del raggio del cerchio di inversione) e è una omotetia con quello stesso centro e potenza il rapporto . Come visto in precedenza se le potenze delle inversioni sono uguali la composizione è l'identità cioè un'omotetia di rapporto 1.



Rette e circonferenze
Una inversione manda rette e circonferenze in rette e circonferenze. Valgono infatti i fatti seguenti:
- Ogni retta passante per il centro d'inversione viene trasformata in sé stessa. Una retta che non passa per viene invece trasformata in una circonferenza passante per .
- Ogni circonferenza passante per viene trasformata in una retta non passante per , e ogni circonferenza non passante per viene trasformata in una circonferenza non passante per .
Due punti qualunque e i loro inversi appartengono ad una stessa circonferenza, oppure sono allineati con il centro d'inversione. Si può osservare che se chiamiamo l'insieme che contiene tutte le rette e le circonferenze del piano allora è un insieme globalmente invariante rispetto l'inversione circolare per quanto appena detto. Cioè dato allora .



Mappa conforme

L'inversione è una mappa conforme. Si tratta cioè di una funzione che preserva gli angoli fra curve piane. Ad esempio, le circonferenze ortogonali a sono insiemi globalmente invarianti (o figure unite) per l'inversione: vengono cioè trasformati in sé stessi. Un'altra conseguenza di questa proprietà è che data una curva nel piano e il suo cerchio osculatore in un punto allora l'immagine di questo cerchio è il cerchio osculatore della curva immagine nell'immagine del punto .




Orientazione
Come la riflessione, l'inversione cambia l'orientazione del piano (o della sfera).
Nel piano cartesiano
Introducendo un sistema di riferimento cartesiano ortogonale la cui origine coincida con il centro dell'inversione, è possibile esprimere l'inversione come la trasformazione che trasforma il punto nel punto tramite le equazioni:




Esempio
Analizziamo l'effetto di una inversione con raggio sulle curve seguenti:



Queste sono rispettivamente una retta passante per l'origine ed una circonferenza centrata nell'origine, di raggio unitario. La trasformazione inversa ha lo stesso aspetto di quella originaria (perché l'inversione è una involuzione), e cioè

Sostituendo si ottiene quindi

da cui si ottiene

La retta trasformata coincide quindi con quella di partenza.
Per la seconda curva, vale

da cui si ottiene

La trasformata è quindi una circonferenza di raggio più grande, pari a .

Nel piano complesso
Una inversione nel piano complesso può essere descritta in modo più stringato. Ad esempio, l'inversione di centro l'origine e raggio è descritta nel modo seguente:

Si può osservare che nel caso in cui il raggio considerato sia unitario allora l'inversione circolare di coincide con l'inverso complesso del coniugato di . Cioè se , allora accade che



Funzioni olomorfe e antiolomorfe
L'inversione è una funzione antiolomorfa. Non è una funzione olomorfa perché cambia l'orientazione del piano.
La composizione di due inversioni è però sempre una funzione olomorfa: si tratta di un biolomorfismo dalla sfera di Riemann in sé. Una tale trasformazione è detta trasformazione di Möbius.
In dimensione più alta
L'inversione può essere definita analogamente in dimensione 3 o superiore. In questo caso, l'inversione è effettuata rispetto ad una sfera, o ad una ipersfera. Molte delle proprietà elencate per il piano vengono generalizzate.
Definizione
L'inversione di centro e raggio in è la mappa


Qui è un punto di , centro dell'inversione. L'inversione è definita su tutto , tranne che in . Però si estende a tutta la sfera

ponendo

L'estensione è una funzione continua e biunivoca della sfera in sé

Proprietà
Involuzione
L'inversione è una involuzione, cioè è la funzione identità. In particolare, è un omeomorfismo della sfera in sé.

Piani e sfere
Fissato , una inversione manda piani affini e sfere -dimensionali in sé (una sfera -dimensionale è una sfera contenuta in uno spazio affine di dimensione ). Piani contenenti il centro vengono lasciati invarianti, sfere non contenenti il centro vengono trasformate in altre sfere non contenenti il centro, mentre piani non contenenti il centro vengono trasformati in sfere contenenti il centro (e viceversa).



Mappa conforme
L'inversione è una mappa conforme (sia se considerata sullo spazio, che sulla sfera). Per verificarlo basta notare che l'inversione può essere scritta come composizione di mappe olomorfe. Altrimenti si può calcolare esplicitamente la derivata nello spazio euclideo e notare che si tratta di una similitudine, in quanto la derivata è formata da una omotetia e da una riflessione, questo basta per implicare la conformità della primitiva. La derivata, nel caso in cui il centro dell'inversione sia l'origine, assume la seguente forma:

Si nota che la parte a sinistra è uno scalare e quindi realizza un omotetia di centro l'origine. La parte destra invece è la riflessione rispetto all'iperpiano perpendicolare al vettore , che in particolare è una isometria.

Bibliografia
- (EN) Marcel Berger, Geometry I, Springer, 1987, ISBN 978-3-540-11658-5.
- Maria Dedò, Trasformazioni geometriche. Con una introduzione al modello di Poincaré, Zanichelli, 1996, ISBN 978-8808162601.
- (EN) Harold Coxeter, Introduction to Geometry, John Wiley & Sons, 1961.
- (EN) Roger A. Johnson, Advanced Euclidean Geometry, Dover Publication, 2007, ISBN 9780486462370.
Voci correlate
Altri progetti
Altri progetti
- Wikimedia Commons
 Wikimedia Commons contiene immagini o altri file su inversione circolare
Wikimedia Commons contiene immagini o altri file su inversione circolare
| Controllo di autorità | Thesaurus BNCF 27893 |
|---|
 Portale Matematica: accedi alle voci di Wikipedia che trattano di matematica
Portale Matematica: accedi alle voci di Wikipedia che trattano di matematica







